
Think about you’re visiting a pal overseas, and also you look inside their fridge to see what would make for an excellent breakfast. Lots of the gadgets initially seem overseas to you, every encased in unfamiliar packaging and containers. Regardless of these visible distinctions, you start to grasp what every one is used for and decide them up as wanted.

Robotic picture recognition – illustrative photograph. Picture credit score: MIT CSAIL
Impressed by people’ skill to deal with unfamiliar objects, a bunch from MIT’s Laptop Science and Artificial Intelligence Laboratory (CSAIL) designed Function Fields for Robotic Manipulation (F3RM), a system that blends 2D photographs with basis mannequin options into 3D scenes to assist robots establish and grasp close by gadgets.
F3RM can interpret open-ended language prompts from people, making the tactic useful in real-world environments that include 1000’s of objects, like warehouses and households.
F3RM permits robots to interpret open-ended textual content prompts utilizing pure language, serving to the machines manipulate objects. Because of this, the machines can perceive much less particular human requests and nonetheless full the specified job.
For instance, if a person asks the robotic to “decide up a tall mug,” the robotic can find and seize the merchandise that most closely fits that description.
“Making robots that may really generalize in the actual world is extremely onerous,” says Ge Yang, postdoc on the Nationwide Science Basis AI Institute for Artificial Intelligence and Elementary Interactions and MIT CSAIL.
“We actually wish to work out how to try this, so with this undertaking, we attempt to push for an aggressive degree of generalization, from simply three or 4 objects to something we discover in MIT’s Stata Heart. We wished to learn to make robots as versatile as ourselves, since we are able to grasp and place objects although we’ve by no means seen them earlier than.”
Robots studying “what’s the place by trying”
The strategy might help robots with choosing gadgets in massive achievement facilities with inevitable litter and unpredictability. In these warehouses, robots are sometimes given an outline of the stock that they’re required to establish. The robots should match the textual content supplied to an object, no matter variations in packaging, in order that clients’ orders are shipped accurately.
For instance, the achievement facilities of main on-line retailers can include thousands and thousands of things, lots of which a robotic could have by no means encountered earlier than. To function at such a scale, robots want to grasp the geometry and semantics of various gadgets, with some being in tight areas.
With F3RM’s superior spatial and semantic notion talents, a robotic might grow to be more practical at finding an object, putting it in a bin, after which sending it alongside for packaging. Finally, this might assist manufacturing unit staff ship clients’ orders extra effectively.
“One factor that always surprises individuals with F3RM is that the identical system additionally works on a room and constructing scale, and can be utilized to construct simulation environments for robotic studying and huge maps,” says Yang.
“However earlier than we scale up this work additional, we wish to first make this method work actually quick. This fashion, we are able to use one of these illustration for extra dynamic robotic management duties, hopefully in real-time, in order that robots that deal with extra dynamic duties can use it for notion.”
The MIT group notes that F3RM’s skill to grasp completely different scenes might make it helpful in city and family environments. For instance, the strategy might assist personalised robots establish and decide up particular gadgets. The system aids robots in greedy their environment — each bodily and perceptively.
“David Marr outlined visible notion as the issue of figuring out ‘what’s the place by trying,’” says senior writer Phillip Isola, MIT affiliate professor {of electrical} engineering and pc science and CSAIL principal investigator.
“Current basis fashions have gotten actually good at figuring out what they’re taking a look at; they’ll acknowledge 1000’s of object classes and supply detailed textual content descriptions of photographs. On the similar time, radiance fields have gotten actually good at representing the place stuff is in a scene. The mixture of those two approaches can create a illustration of what’s the place in 3D, and what our work exhibits is that this mixture is very helpful for robotic duties, which require manipulating objects in 3D.”
Making a “digital twin”
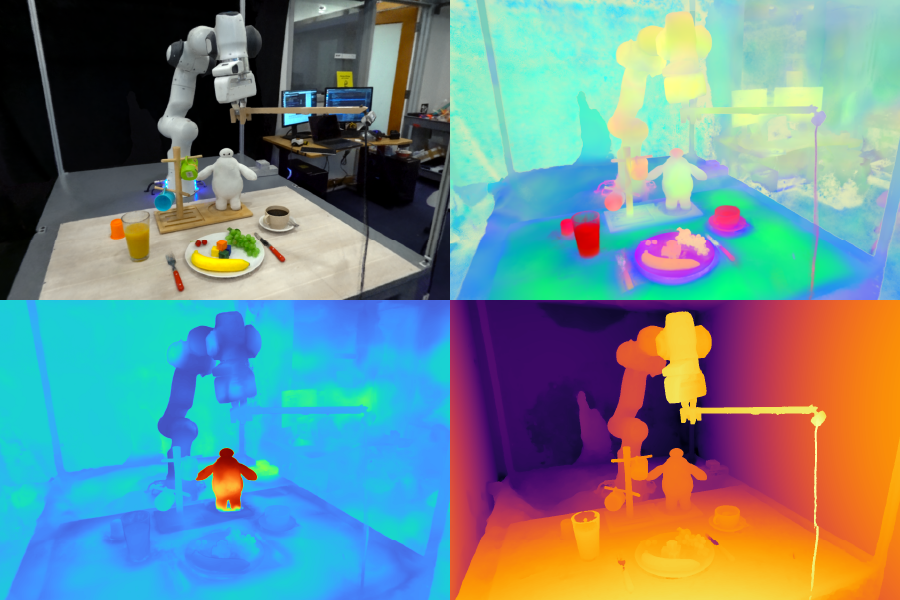
F3RM begins to grasp its environment by taking photos on a selfie stick. The mounted digicam snaps 50 photographs at completely different poses, enabling it to construct a neural radiance field (NeRF), a deep studying technique that takes 2D photographs to assemble a 3D scene. This collage of RGB pictures creates a “digital twin” of its environment within the type of a 360-degree illustration of what’s close by.
Along with a extremely detailed neural radiance subject, F3RM additionally builds a characteristic subject to reinforce geometry with semantic info. The system makes use of CLIP, a imaginative and prescient basis mannequin skilled on a whole lot of thousands and thousands of photographs to effectively be taught visible ideas. By reconstructing the 2D CLIP options for the pictures taken by the selfie stick, F3RM successfully lifts the 2D options right into a 3D illustration.
Preserving issues open-ended
After receiving just a few demonstrations, the robotic applies what it is aware of about geometry and semantics to understand objects it has by no means encountered earlier than. As soon as a person submits a textual content question, the robotic searches by means of the area of attainable grasps to establish these most definitely to achieve choosing up the thing requested by the person.
Every potential possibility is scored based mostly on its relevance to the immediate, similarity to the demonstrations the robotic has been skilled on, and if it causes any collisions. The best-scored grasp is then chosen and executed.
To display the system’s skill to interpret open-ended requests from people, the researchers prompted the robotic to choose up Baymax, a personality from Disney’s “Large Hero 6.” Whereas F3RM had by no means been immediately skilled to choose up a toy of the cartoon superhero, the robotic used its spatial consciousness and vision-language options from the muse fashions to determine which object to understand and decide it up.
F3RM additionally permits customers to specify which object they need the robotic to deal with at completely different ranges of linguistic element. For instance, if there’s a metallic mug and a glass mug, the person can ask the robotic for the “glass mug.”
If the bot sees two glass mugs and one in all them is stuffed with espresso and the opposite with juice, the person can ask for the “glass mug with espresso.” The muse mannequin options embedded inside the characteristic subject allow this degree of open-ended understanding.
“If I confirmed an individual decide up a mug by the lip, they might simply switch that data to choose up objects with comparable geometries comparable to bowls, measuring beakers, and even rolls of tape. For robots, attaining this degree of adaptability has been fairly difficult,” says MIT PhD scholar, CSAIL affiliate, and co-lead writer William Shen.
“F3RM combines geometric understanding with semantics from basis fashions skilled on internet-scale knowledge to allow this degree of aggressive generalization from only a small variety of demonstrations.”
Written by Alex Shipps

Discussion about this post