
Centimeter-scale strolling and crawling robots are in demand each for his or her skill to discover tight or cluttered environments and for his or her low fabrication prices. Now, pulling from origami-inspired building, researchers led by Cynthia Sung, Gabel Household Time period Assistant Professor in Mechanical Engineering and Applied Mechanics (MEAM), have crafted a extra simplified strategy to designing and fabricating these robots.

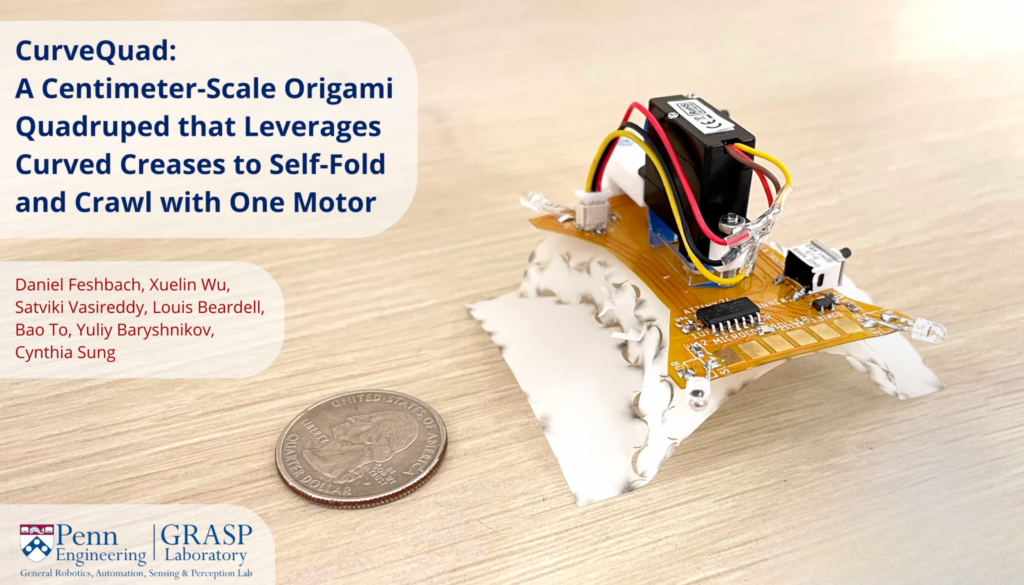
The brand new centimeter-scale quadruped robotic. Picture credit score: Sung Lab
Referred to as CurveQuad, this centimeter-scale quadruped leverages curved-crease origami to self-fold, unfold, crawl and steer, all utilizing a single motor.
The curved creases on this method have attention-grabbing mechanical properties as in comparison with extra generally used straight crease designs as a result of they induce bending in a folded sheet. Vitality, saved within the folding of creases and the bending of panels, permits for managed, reversible and sophisticated motions utilizing fewer actuators.
“The robotic is ready to do these items as a result of it makes use of curved creases,” says Sung, additionally a member of Penn’s General Robotics, Automation, Sensing and Perception (GRASP) Lab.
“Since it’s easy and thus comparatively low-cost, we think about that related designs might be made sooner or later for fast deployment of robotic swarms, which may very well be produced for {dollars} and even cents per robotic.”
The findings are printed within the journal Proceedings of the IEEE/RSJ Worldwide Convention on Clever Robots and Techniques. Researchers offered their work on October 2 on the 2023 IEEE/RSJ Worldwide Convention on Clever Robots and Techniques (IROS 2023), held in Detroit, MI.
CurveQuad’s single motor for self-folding and motion reduces the robotic’s complete mass and quantity.
The origami-inspired design additionally simplifies the manufacturing and meeting of a centimeter-scale robotic by fabricating all the robotic, or its elements, from a number of flat sheets of fabric, then folding it into its 3D form, usually with absolutely embedded electronics, actuators and computation onboard. These manufacturing processes are additionally scalable to large-volume manufacturing.
CurveQuad is a brand new addition to the sparsely populated design house of steerable, single-actuator strolling robots. At simply eight centimeters lengthy and weighing roughly 11 grams, it’s comparatively small and light-weight for a motor-based strolling robotic, says Daniel Feshbach, lead creator and a doctoral scholar within the Sung Robotics Lab.
“The broadest implication of CurveQuad is to contribute proof that the attractive, easy bending of curved folds can result in complicated and helpful motion from quite simple fold patterns,” he says. “The curved crease sample is the central function that allows CurveQuad to self-fold, crawl and steer with only one motor.”
Researchers demonstrated fundamental suggestions management by steering the robotic towards a lightweight supply from totally different beginning positions and orientations. The workforce then illustrated swarm aggregation by way of 4 robots concurrently steering towards the sunshine.
The outcomes spotlight how curved crease origami in self-assembling and deployable robots helps complicated motions like locomotion. Future analysis will study how small, expendable robots might discover cluttered or harmful environments.
“The CurveQuad is a part of a line of labor in our lab centered on simplifying robotic design and meeting in order that they are often extra accessible, customizable and usable to most people,” says Sung.
“Assume, for instance, about bringing a field of flatpack robots someplace, having all of them fold and stroll round to do exploration or sensing, after which flattening again into the field for storage till the subsequent use. We’re presently engaged on a second model of this robotic with absolutely built-in electronics in order that we will reveal this functionality.”
Supply: University of Pennsylvania

Discussion about this post