
The brand new platform makes use of human measurement information, musculoskeletal evaluation, and machine studying, to allow the event of humanoid robots and robotic simulations.
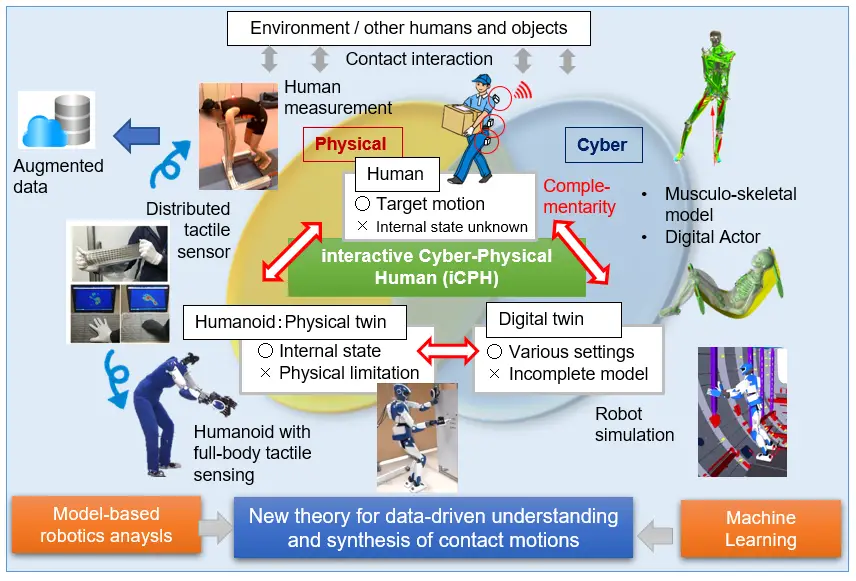
iCPH makes use of human measurement information, musculoskeletal evaluation, and machine studying, enabling complementary humanoid robots (bodily twins) and robotic simulations (digital twins) to know, predict, and synthesize human-like contact motions. Picture credit score: Eiichi Yoshida from the Tokyo College of Science
Performing human-like motions that contain a number of contacts is difficult for robots. On this regard, a researcher from the Tokyo College Science has envisioned an interactive cyber-physical human (iCPH) platform with complementary humanoid (bodily twin) and simulation (digital twin) parts.
iCPH combines human measurement information, musculoskeletal evaluation, and machine studying for information assortment and augmentation. Consequently, iCPH can perceive, predict, and synthesize whole-body contact motions.
People naturally carry out quite a few complicated duties. These embody sitting down, choosing one thing up from a desk, and pushing a cart. These actions contain varied actions and require a number of contacts, which makes it troublesome to program robots to carry out them.
Just lately, Professor Eiichi Yoshida of the Tokyo College of Science has put ahead the concept of an interactive cyber-physical human (iCPH) platform to sort out this drawback. It could assist perceive and generate human-like programs with contact-rich whole-body motions. His work was published in Frontiers in Robotics and AI.
Prof. Yoshida briefly describes the basics of the platform. “Because the title suggests, iCPH combines bodily and cyber parts to seize human motions. Whereas a humanoid robotic acts as a bodily twin of a human, a digital twin exists as a simulated human or robotic in our on-line world. The latter is modeled by means of methods corresponding to musculoskeletal and robotic evaluation. The 2 twins complement one another.”
This analysis raises a number of key questions. How can humanoids mimic human movement? How can robots study and simulate human behaviors? And the way can robots work together with people easily and naturally? Prof. Yoshida addresses them on this framework.
First, within the iCPH framework, human movement is measured by quantifying the form, construction, angle, velocity, and drive related to the motion of varied physique components. As well as, the sequence of contacts made by a human can be recorded.
Consequently, the framework permits the generic description of varied motions by means of differential equations and the technology of a contact movement community upon which a humanoid can act.
Second, the digital twin learns this community through model-based and machine studying approaches. They’re bridged collectively by the analytical gradient computation technique. Continuous studying teaches the robotic simulation carry out the contact sequence.
Third, iCPH enriches the contact movement community through information augmentation and applies the vector quantization approach. It helps extract the symbols expressing the language of contact movement. Thus, the platform permits the technology contact movement in inexperienced conditions. In different phrases, robots can discover unknown environments and work together with people through the use of easy motions involving many contacts.
In impact, the writer places ahead three challenges. These pertain to the overall descriptors, continuous studying, and symbolization of contact movement. Navigating them is important for realizing iCPH. As soon as developed, the novel platform can have quite a few purposes.
“The information from iCPH might be made public and deployed to real-life issues for fixing social and industrial points. Humanoid robots can launch people from many duties involving extreme burdens and enhance their security, corresponding to lifting heavy objects and dealing in hazardous environments. iCPH will also be used to observe duties carried out by people and assist forestall work-related illnesses. Lastly, humanoids may be remotely managed by people by means of their digital twins, which is able to enable the humanoids to undertake giant tools set up and object transportation,” says Prof. Yoshida, on the purposes of iCPH.
Utilizing the iCPH as floor zero and with the assistance of collaborations from totally different analysis communities, together with robotics, synthetic intelligence, neuroscience, and biomechanics, a future with humanoid robots will not be far.
Supply: Tokyo University of Science

Discussion about this post