
Researchers at Columbia Engineering have demonstrated a extremely dexterous robotic hand that mixes a sophisticated sense of contact with motor studying algorithms to attain a excessive stage of dexterity.
As an illustration of talent, the workforce selected a troublesome manipulation process: executing an arbitrarily massive rotation of an inconsistently formed grasped object in hand whereas all the time sustaining the article in a secure, safe maintain.
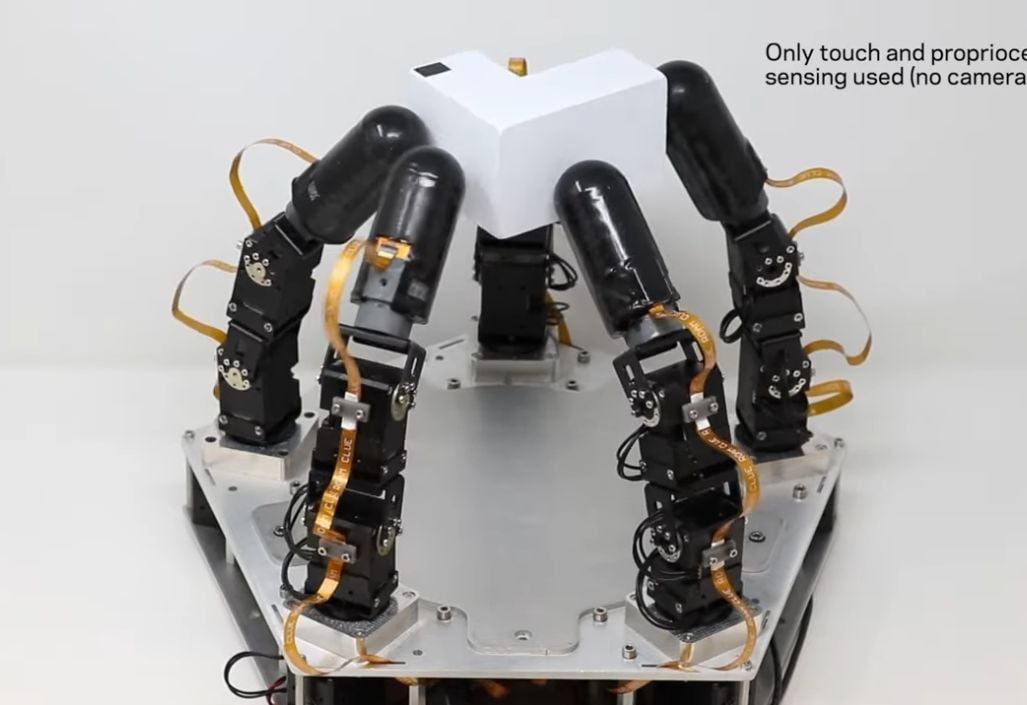
This process could be very troublesome as a result of it requires fixed repositioning of a subset of fingers, whereas the opposite fingers need to preserve the article secure. Not solely was the hand in a position to carry out this process, but it surely additionally did it with none visible suggestions in anyway, based mostly solely on contact sensing.
Robotic hand – grip take a look at setup. Picture credit score: Columbia College ROAM Lab
Along with the brand new ranges of dexterity, the hand labored with none exterior cameras, so it’s resistant to lighting, occlusion, or comparable points. And the truth that the hand doesn’t depend on imaginative and prescient to control objects implies that it will probably accomplish that in very troublesome lighting circumstances that might confuse vision-based algorithms–it will probably even function at nighttime.
“Whereas our demonstration was on a proof-of-concept process, meant as an instance the capabilities of the hand, we consider that this stage of dexterity will open up solely new functions for robotic manipulation in the true world,” mentioned Matei Ciocarlie, affiliate professor within the Departments of Mechanical Engineering and Computer Science.
“Among the extra instant makes use of is likely to be in logistics and materials dealing with, serving to ease up provide chain issues like those which have plagued our economic system lately, and in superior manufacturing and meeting in factories.”
Leveraging optics-based tactile fingers

Tactile robotic fingers. Picture credit score: Columbia College ROAM Lab
In earlier work, Ciocarlie’s group collaborated with Ioannis Kymissis, professor {of electrical} engineering, to develop a brand new technology of optics-based tactile robot fingers.
These had been the primary robotic fingers to attain contact localization with sub-millimeter precision whereas offering full protection of a posh multi-curved floor. As well as, the compact packaging and low wire depend of the fingers allowed for straightforward integration into full robotic arms.
Instructing the hand to carry out advanced duties

Performing advanced duties. Picture credit score: Columbia College ROAM Lab
For this new work, led by CIocarlie’s doctoral researcher, Gagan Khandate, the researchers designed and constructed a robotic hand with 5 fingers and 15 independently actuated joints–every finger was outfitted with the workforce’s touch-sensing know-how.
The following step was to check the power of the tactile hand to carry out advanced manipulation duties. To do that, they used new strategies for motor studying, or the power of a robotic to be taught new bodily duties by way of follow. Specifically, they used a way referred to as deep reinforcement studying, augmented with new algorithms that they developed for efficient exploration of potential motor methods.
Robotic accomplished roughly one 12 months of follow in solely hours of real-time
The enter to the motor studying algorithms consisted completely of the workforce’s tactile and proprioceptive knowledge, with none imaginative and prescient.
Utilizing simulation as a coaching floor, the robotic accomplished roughly one 12 months of follow in solely hours of real-time, because of fashionable physics simulators and extremely parallel processors. The researchers then transferred this manipulation talent skilled in simulation to the true robotic hand, which achieved the extent of dexterity the workforce hoped for.
Ciocarlie famous that “the directional purpose for the sector stays assistive robotics within the dwelling, the last word proving floor for actual dexterity. This research exhibits that robotic arms will also be extremely dexterous based mostly on contact sensing alone. As soon as we additionally add visible suggestions into the combo together with contact, we hope to have the ability to obtain much more dexterity, and in the future begin approaching the replication of the human hand.”
Final purpose: becoming a member of summary intelligence with embodied intelligence
In the end, Ciocarlie noticed, a bodily robotic being helpful in the true world wants each summary, semantic intelligence (to know conceptually how the world works), and embodied intelligence (the talent to bodily work together with the world).
Massive language fashions similar to OpenAI’s GPT-4 or Google’s PALM purpose to offer the previous, whereas dexterity in manipulation as achieved on this research represents complementary advances within the latter.
As an illustration, when requested make a sandwich, ChatGPT will kind out a step-by-step plan in response, but it surely takes a dexterous robotic to take that plan and truly make the sandwich.
In the identical manner, researchers hope that bodily expert robots will be capable to take semantic intelligence out of the purely digital world of the Web, and put it to good use on real-world bodily duties, even perhaps in our houses.
Supply: Columbia University

Discussion about this post